


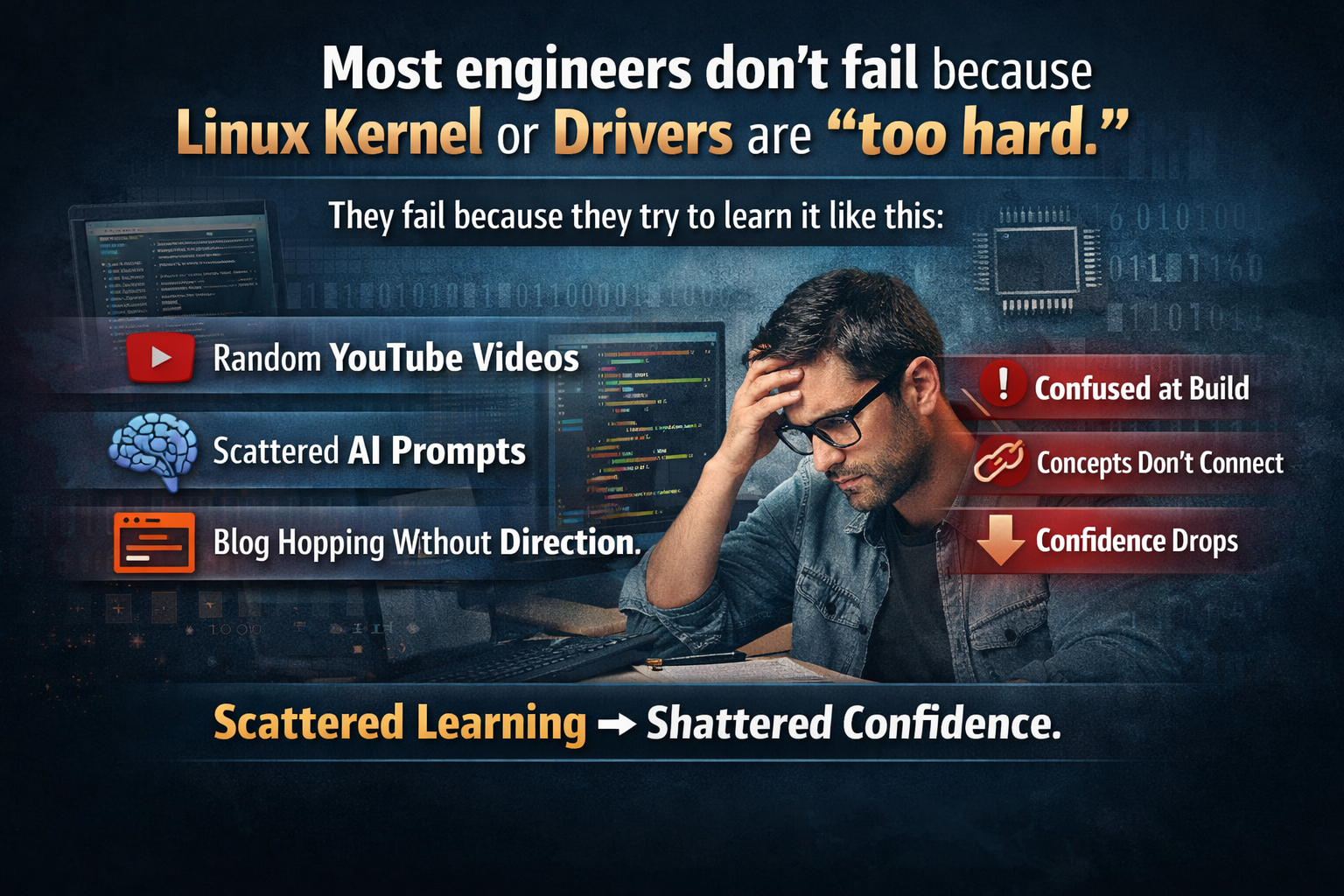
Why Most Engineers Fail in Self-Learning Advanced Topics Like Linux Drivers — And How to Overcome It
Every year, thousands of engineers decide, “I’m going to learn Linux Kernel / Drivers on my own.” They start: Scouting for books, Bookmark tutorials, Watch videos, Use AI… For a few days, they feel productive, feel they have got all the required information And then? Slowly they start to see:
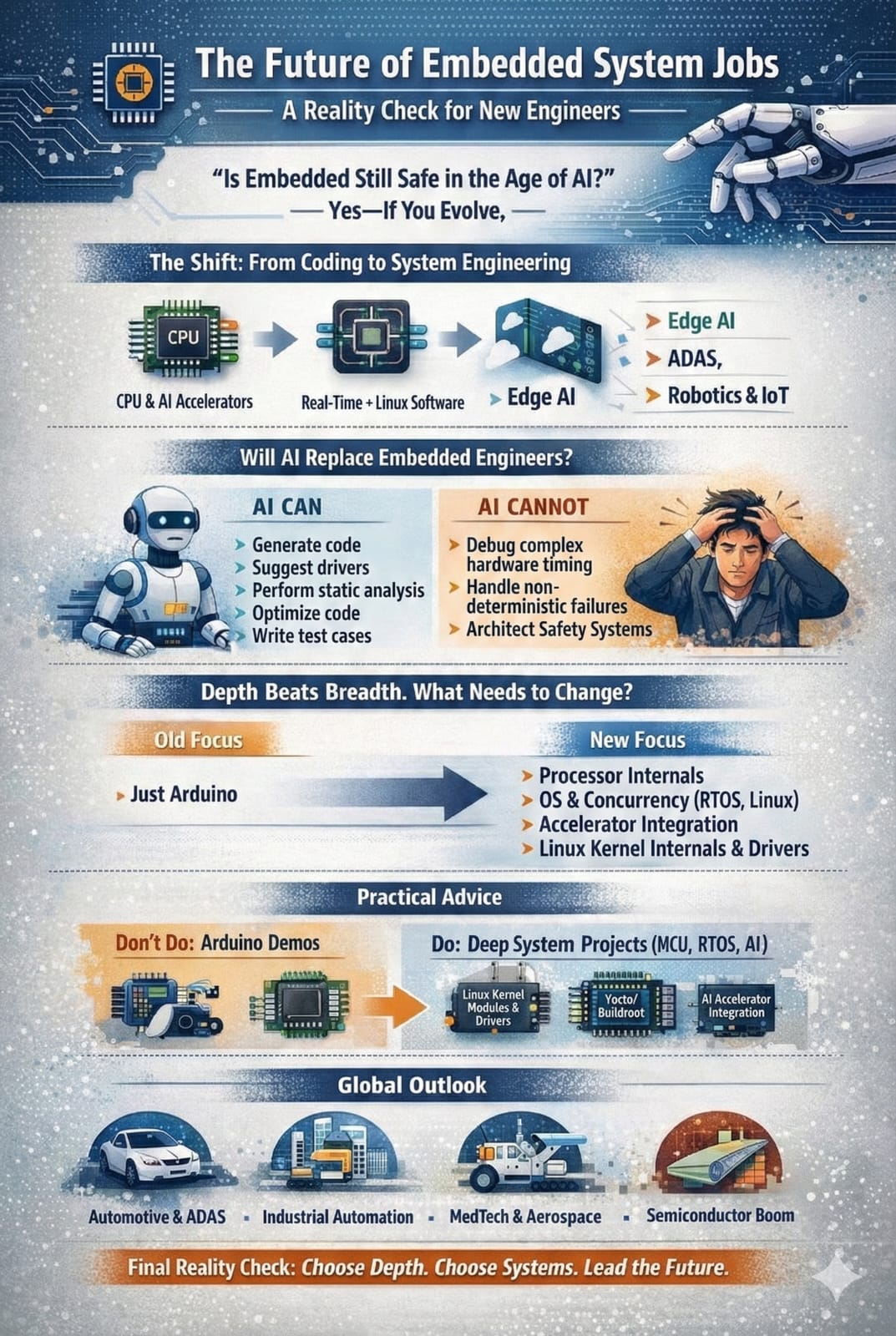
The Future of Embedded System Jobs in the Age of AI
Artificial Intelligence is writing code.
AI tools are debugging faster.
Automation is increasing.
So it’s natural for embedded engineers to ask: “Is embedded engineering still a safe career in the age of AI?”

Softdel signs TECH VEDA for corporate training on Embedded Linux
Softdel signs TECH VEDA for delivering corporate training program on Embedded Linux. Softdel becomes our 49th client.
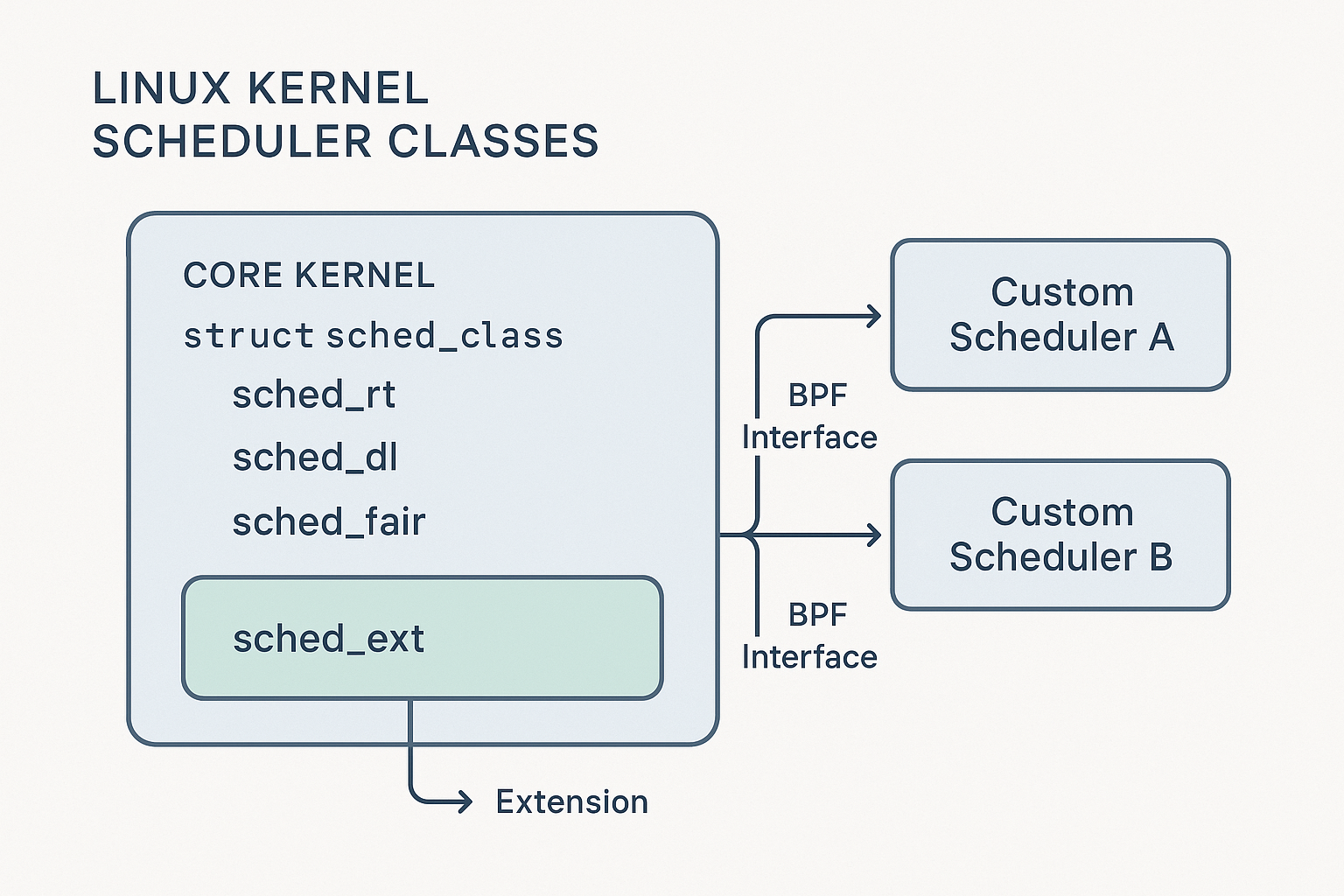
Meet the sched_ext Ecosystem
This article provides a deep dive into the major scheduler classes, their unique design goals, and the management utilities powering the system.
