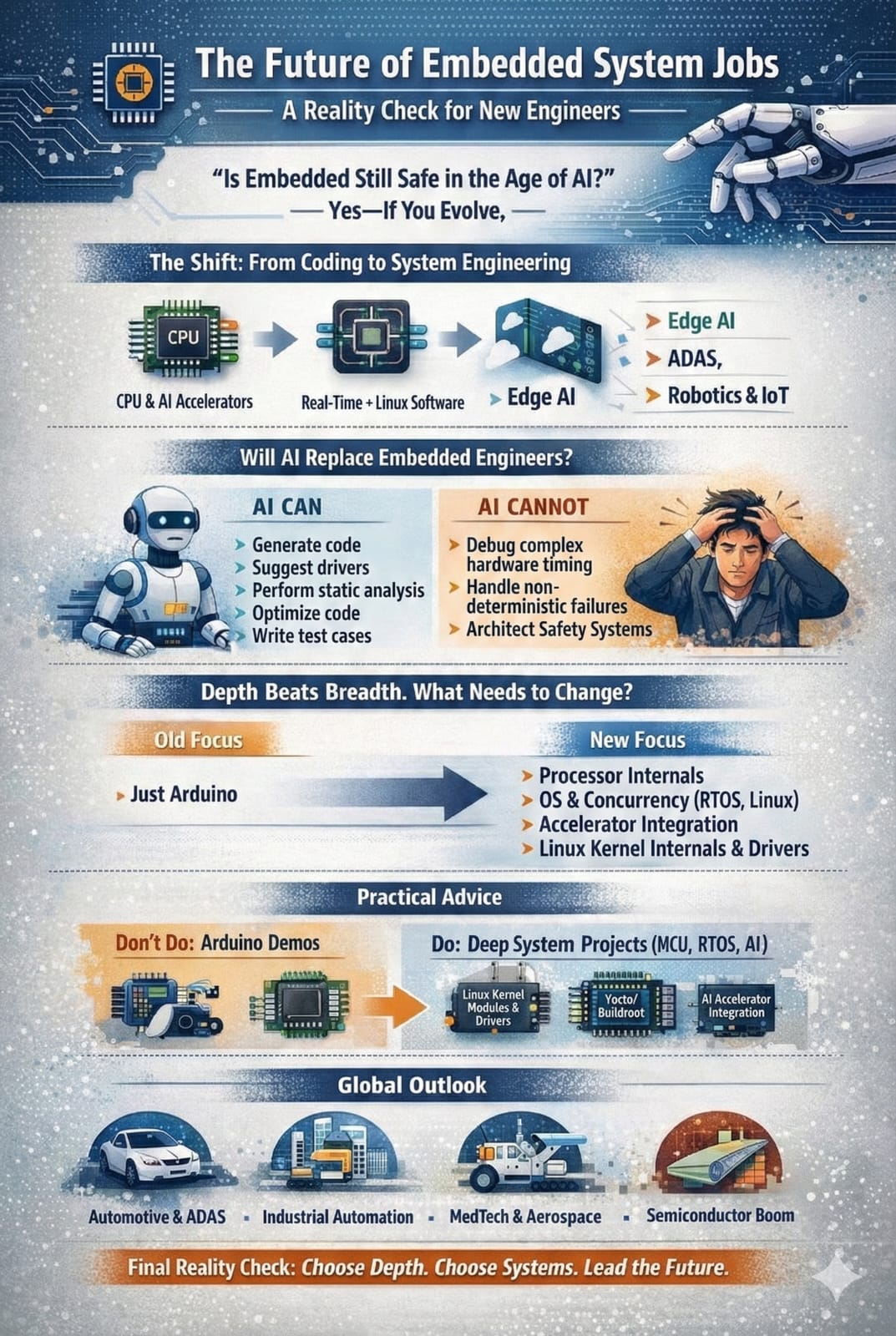
Why Most Engineers Fail in Self-Learning Advanced Topics Like Linux Drivers — And How to Overcome It
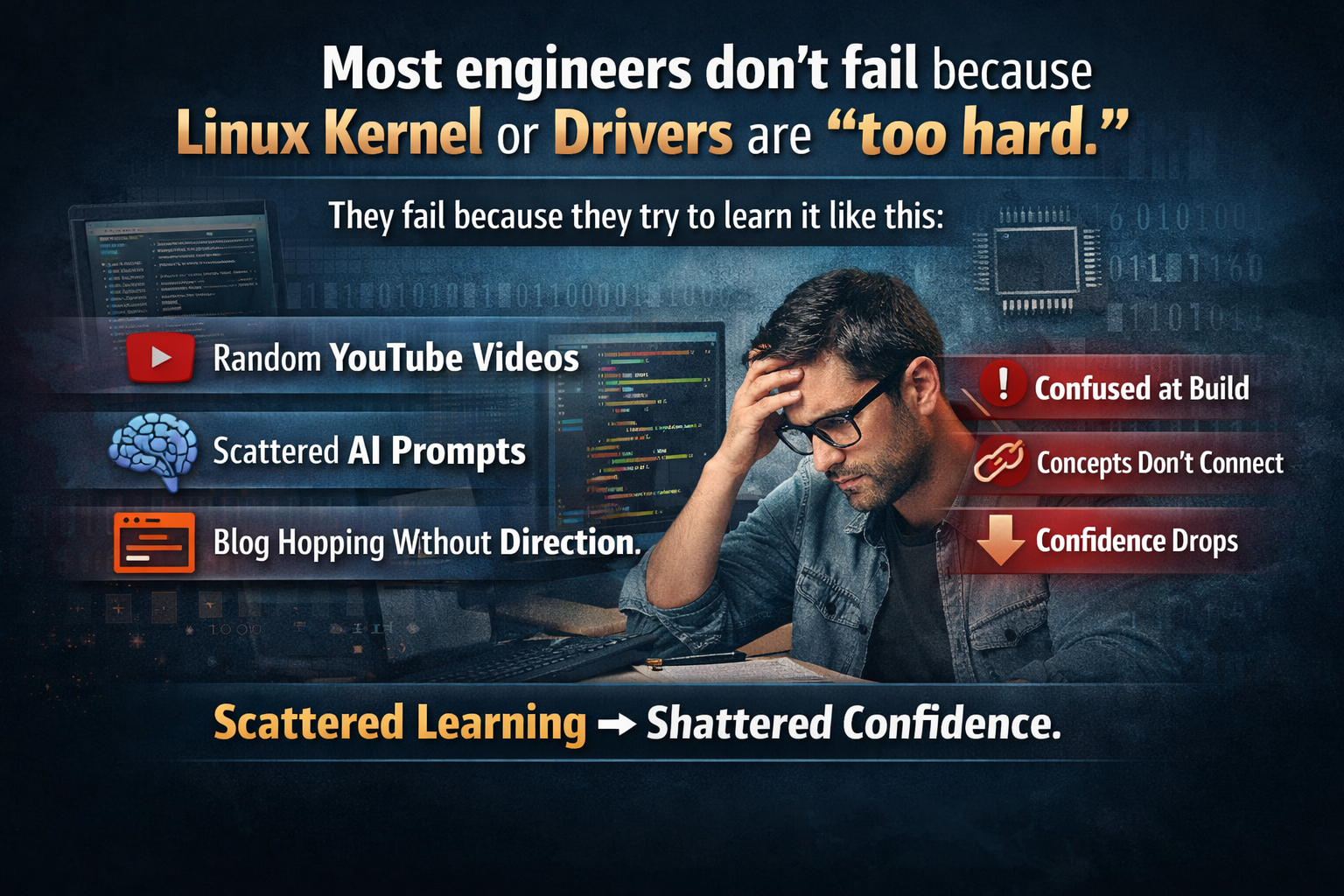
Every year, thousands of engineers decide, “I’m going to learn Linux Kernel / Drivers on my own.” They start: Scouting for books, Bookmark tutorials, Watch videos, Use AI… For a few days, they feel productive, feel they have got all the required information And then? Slowly they start to see: